3.2.7. Dimensionamento Energético do Subsistema de Potência
Análise de Consumo dos Componentes Atuadores e Lógicos
A análise de consumo de potência de todos componentes para a operação do simulador direct drive foi realizada com base nas especificações de corrente fornecidas. A Tabela 1 mostra o consumo máximo individual e total, e a figura 1 ilustra o subsistema de alimentação.
| Componente | Tensão Nominal (V) | Corrente Máx. (A) | Potência Máx. (W) | Quantidade | Potência Total (W) |
|---|---|---|---|---|---|
| Motor Principal | 24 | 15 | 360 | 1 | 360 |
| Motor de Vibração | 12 | 0,5 | 6 | 3 | 18 |
| Raspberry Pi 4 | 5 | 3 | 15 | 1 | 15 |
| Tela | 5 | 3 | 15 | 1 | 15 |
| Arduino | 5 | 0,015 | 0,075 | 1 | 0,075 |
| HX711 | 5 | 0,0014 | 0,007 | 1 | 0,007 |
| Sensor Hall | 5 | 0,0015 | 0,0075 | 2 | 0,015 |
| Potência Máxima Total | 408,10 |
Tabela 1: Consumo Máximo de Potência dos Componentes
Nota: O consumo do Odrive é inerente ao acionamento do Motor Principal e não adicionado separadamente no somatório de potência para evitar dupla contagem, sendo sua capacidade dimensionada em função da carga do motor.
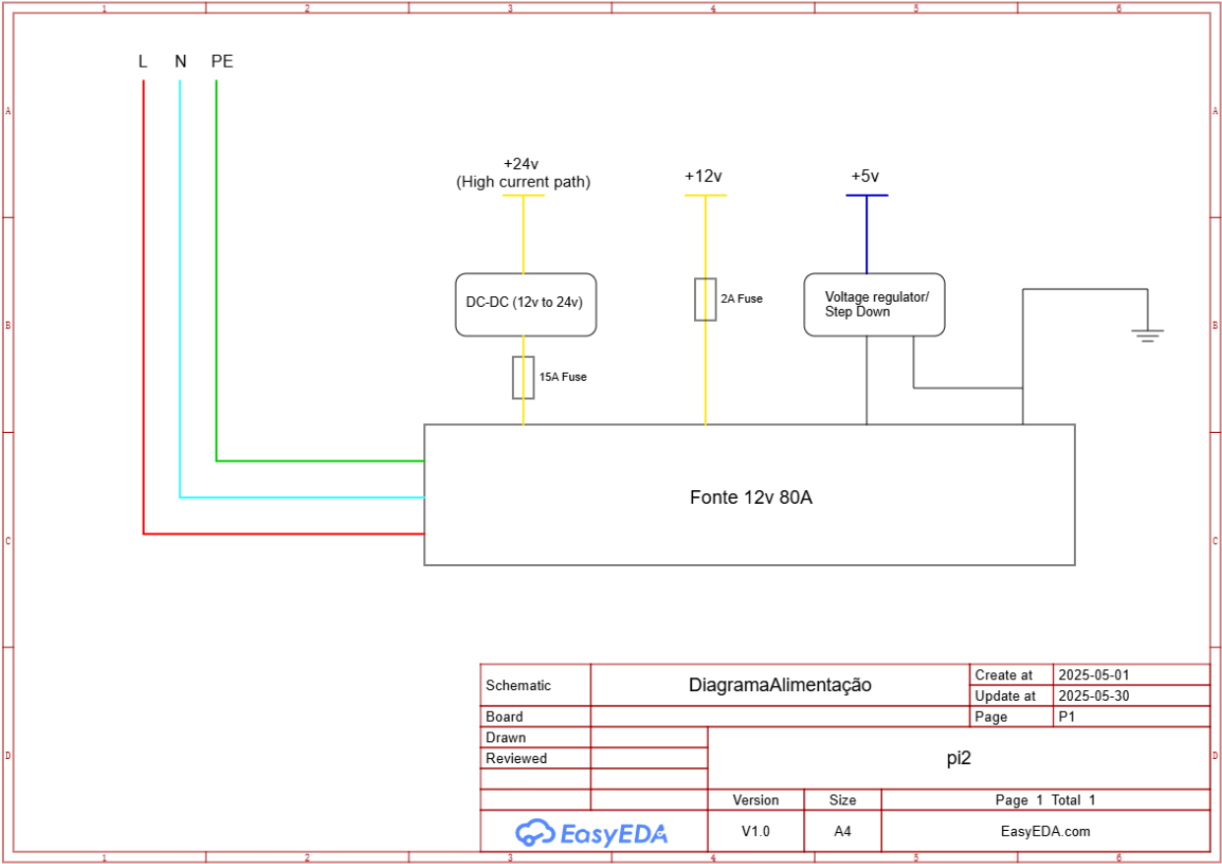
Figura 9: Diagrama Geral de Alimentação
Dimensionamento da Fonte de Alimentação Principal
Com base na potência máxima total calculada de 408 W, e aplicando uma margem de segurança de 25% para picos transientes, perdas e futuras expansões, a potência nominal requerida da fonte principal é de 408W × 1.25 ≈ 510W. A fonte de alimentação central selecionada é uma unidade de 12V e 80A, o que confere uma capacidade máxima de 12V × 80A = 960W. Esta capacidade é significativamente superior à demanda calculada, proporcionando robustez, confiabilidade e ampla folga para operação contínua e picos de corrente.
Subsistemas de Regulação e Distribuição de Tensão
O subsistema de potência é distribuído em três trilhas de tensão principais (24V, 12V, 5V) a partir da fonte principal de 12V: Trilha de 24V (Atuação Principal): Um conversor DC-DC step-up (boost) é empregado para elevar a tensão de 12V para 24V. Para suprir o motor principal de 15A @ 24V (360W), este conversor deve ser especificado para uma potência de saída mínima de 360W, implicando uma corrente de entrada de aproximadamente 35-40A @ 12V (considerando eficiência de ~85%). A proteção desta linha será realizada por um fusível de 15A na entrada adequadamente dimensionado para a corrente de pico.
Trilha de 12V (Atuadores Secundários): Esta linha é alimentada diretamente pela fonte principal de 12V. O consumo máximo é de 1.5A para os motores de vibração. Um fusível de 2A é inserido para proteção da linha, dimensionado para tolerar correntes de partida e oferecer margem para futuras cargas. Trilha de 5V (Lógica e Periféricos): Para atender à demanda de corrente combinada de aproximadamente 5.6A (principalmente do Raspberry Pi e da tela), um conversor DC-DC step-down (buck) de 12V para 5V é mandatório. Reguladores lineares como o 7805 são inadequados para esta carga devido à sua limitação de corrente (tipicamente 1-1.5A) e à alta dissipação de potência (Pdiss=(Vin−Vout)×Iout), que geraria calor excessivo (aproximadamente 39.2W). O conversor buck será selecionado para suportar uma corrente de saída mínima de 6-7A, garantindo alta eficiência e minimizando perdas térmicas.
Esta arquitetura de potência, combinada com a capacidade da fonte principal e a seleção apropriada dos conversores DC-DC e dispositivos de proteção, assegura um fornecimento de energia estável, eficiente e seguro para todas as funções do simulador.